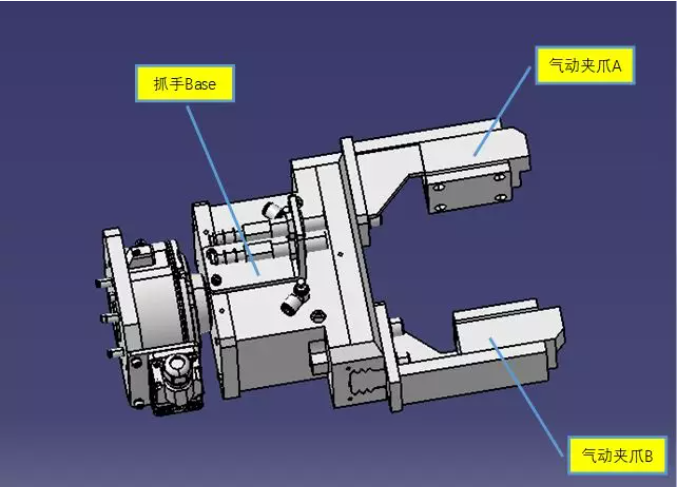
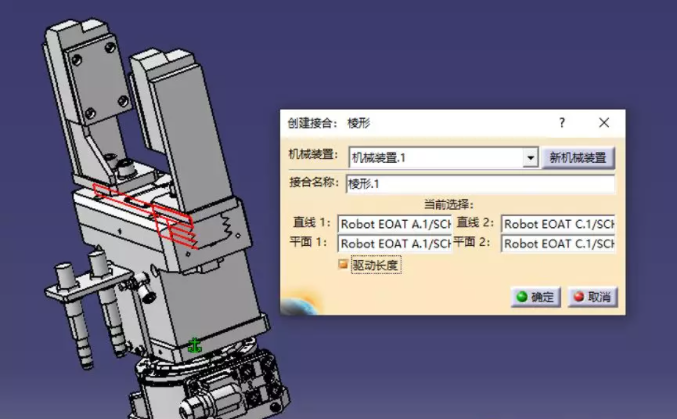
一、抓手数模拆分与装配1.机器人抓手工具的机械机构较为简单,一共可分为抓手Base、气动夹爪A、气动夹爪B三个部分,工作时两个夹爪相对做直线运动实现夹紧与放松动作。2.根据机器人抓手工具的机械结构与工作原理将机器人抓手工具拆分为抓手Base、气动夹爪A、气动夹爪B三个部分,拆分过程可参考前几期中的PDPS数模仿真前数据处理文章,这里不再赘述。注:拆分后的机器人抓手工具各部分分别进行保存,一般保存为零件格式,即保存为*.CATPart格式。3.对拆分后的三部分机器人抓手工具零件重新进行装配,装配步骤可参考参考前几期中的PDPS数模仿真前数据处理文章。二、抓手运动机构制作1.切换到“Device Building”模块,使用“New Mechanism”命令创建机械装置,然后使用“Fixed Part”命令将机器人抓手Base创建为固定零件。2.使用“Prismatic Joint”命令,为机器人抓手的两个气动夹爪A与B,分别创建直线运动,并为夹爪A直线运动勾选“驱动长度”(气动夹爪B直线运动不必勾选)。选择直线与平面对象时可选择夹爪Base与夹爪之间有接触的平面以及在接触平面上共线的平面边缘。3.使用“Kinematic Relations”命令,为机器人抓手的气动夹爪B的直线运动添加运动函数,使得气动夹爪A运动时,气动夹爪B能够与之同步相对运动,实现夹紧与松开动作。说明:Kinematic Relations命令可以为零部件各部分运动机构之间通过函数的形式定义运动学关系。4.使用“Travel Limits”命令为机器人抓手的直线运动设定运动行程的上下限,行程为0~23.5mm。5.使用“Home Positions”命令为机器人抓手添加打开与关闭状态,Open运动状态夹爪行程为0mm,Close运动状态夹爪行程为23.5mm。三、抓手Base坐标与TCP坐标添加1.使用“Frames Of Interest”命令创建一个坐标组,然后使用“Frame Type”命令在机器人夹爪Base的安装面中心处创建一个Base坐标系。2.在机器人抓手的两个夹爪顶端的中心部位创建Tool类型的工具TCP坐标。注:真实的仿真项目中,机器人抓手的TCP坐标的位置需要按照仿真标准设置,本例作为教学演示暂且设置在这里,无论在哪里添加,方法都是一样的。四、仿真运行机器人抓手工具制作完成后,可以使用“Jog Mechanism”命令,对其进行仿真运行。说明:机器人的抓手工具的制作方法基本就是这样的,首先要从机械结构上进行分析,找出固定部分与运动部分,然后对其进行拆分与装配;然后按照抓手的运动形式创建运动副,并设定运动参数,运动形式通常情况下就是两种,即直线运动与旋转运动;最后为工具添加Base坐标与TCP坐标。这里重点要说的是对于运动形式类似的不同的运动部件可以使用“Kinematic Relations”命令定义机构运动函数,通过机构运动函数可以实现只用一个驱动机构实现多个运动机构的同步运行。 更多达索系统资讯,请关注百世慧科技。 12 月82021技术慧分类: 技术慧由 bestway2021年12月8日标签: base抓手机器人气动直线运动文章导航历史的文章历史的文章:DELMIA人机工程培训未来的文章未来的文章:DELMIA产线仿真体系建设经验近期文章装配工艺仿真与可视化分析技术在生产线优化中的应用:提升生产稳定性与柔性2024年11月29日通过机加工仿真技术实现复杂工件的加工路径优化,减少机床磨损与能耗2024年11月29日面向智能制造的装配工艺仿真技术研究与应用,助力生产线自动化与精益化管理2024年11月29日利用高级机加工仿真软件进行工艺规划与优化,降低生产成本和周期2024年11月29日集成CADCAM系统的机加工仿真解决方案:确保产品质量与生产稳定性2024年11月29日运用实时数据驱动的仿真技术提升工厂物流管理水平,实现动态调度与资源优化2024年10月30日