跳转至内容
Delmia企业数字化制造
达索系统
产品
亮点
解决方案
动态
案例
资料
购买
联系我们
400-990-9223
搜索:
产品
亮点
解决方案
动态
案例
资料
购买
联系我们
400-990-9223
DELMIA-机器人仿真与编程
搬运、点焊、电弧焊、喷涂、铆接与喷丸机器人仿真,离线编程
您是如何实现机器人运动调试与编程的呢?漫长的调试与编程周期、难以进行改动的机器人程序无处不在制约着企业的自动化、工艺变革进程。
DELMIA-机器人仿真与编程技术让您实现离线编程。机器人程序员可以模拟和验证机器人任务。程序员可以执行可达性算例、内部锁定分析和离线机器人教学,以为车间提供优化的机器人计划。
DELMIA机器人仿真与编程优势
运动仿真:设定机器人任务并依据模型,可实现机器人的运动仿真。
助力变革:当你的工厂有大量的不同的品牌的机器人时,可运用仿真与编程,优化工艺与生产过程。
离线编程:编程通过虚拟仿真实现,但完全可以在机器人上应用。
角色/功能
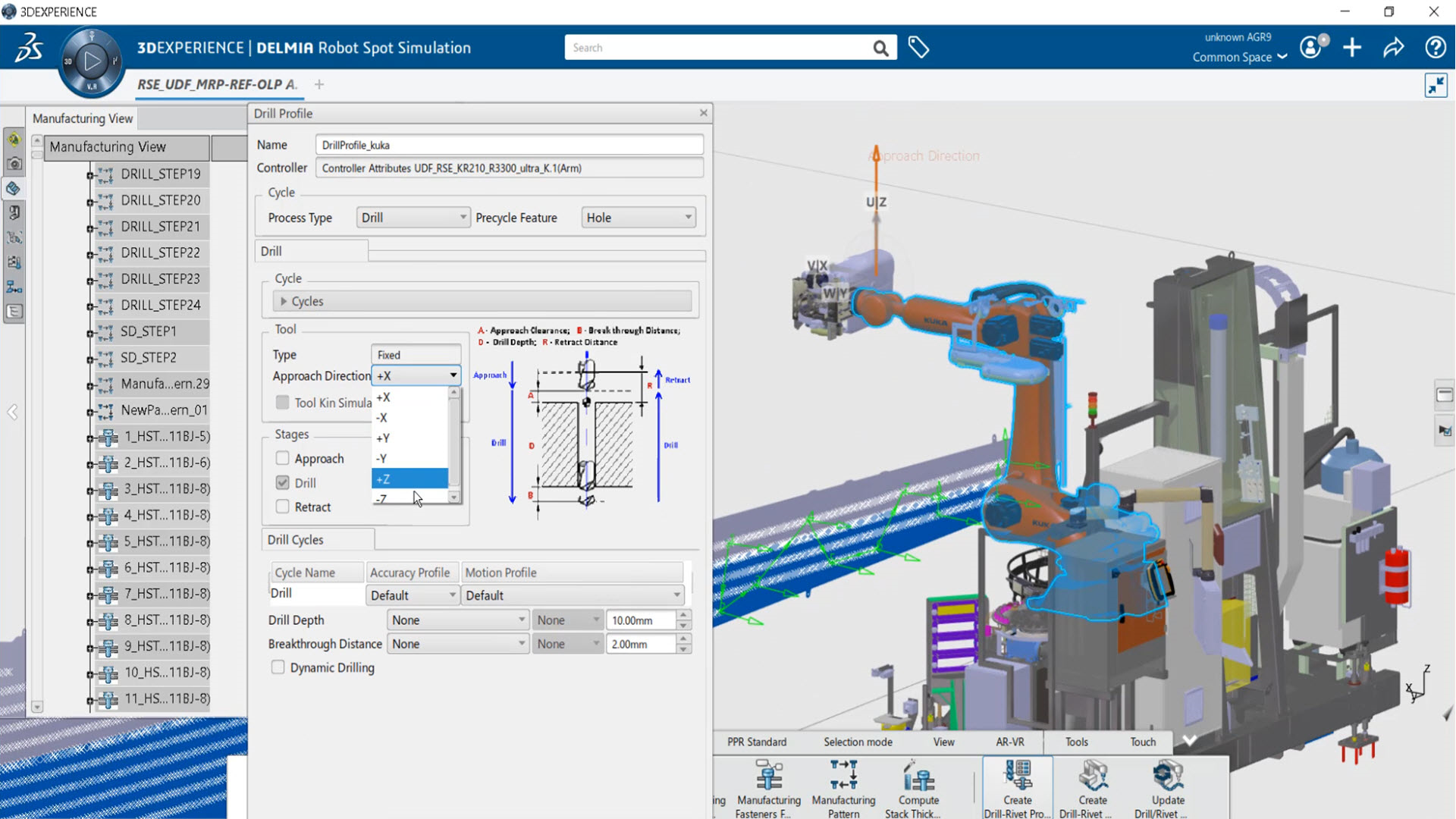
钻孔和铆接机器人
在 3D 虚拟工厂环境中对复杂的机器人钻孔和铆接系统进行编程、仿真和验证:
模拟和验证完整的钻孔和铆接机器人系统,以消除代价高昂的碰撞并优化生产率。
提供精确的生产就绪型机器人程序,同时通过脱机机器人编程使机器人保持生产状态。
允许实现同步工程,以通过脱机机器人编程加快生产启动。
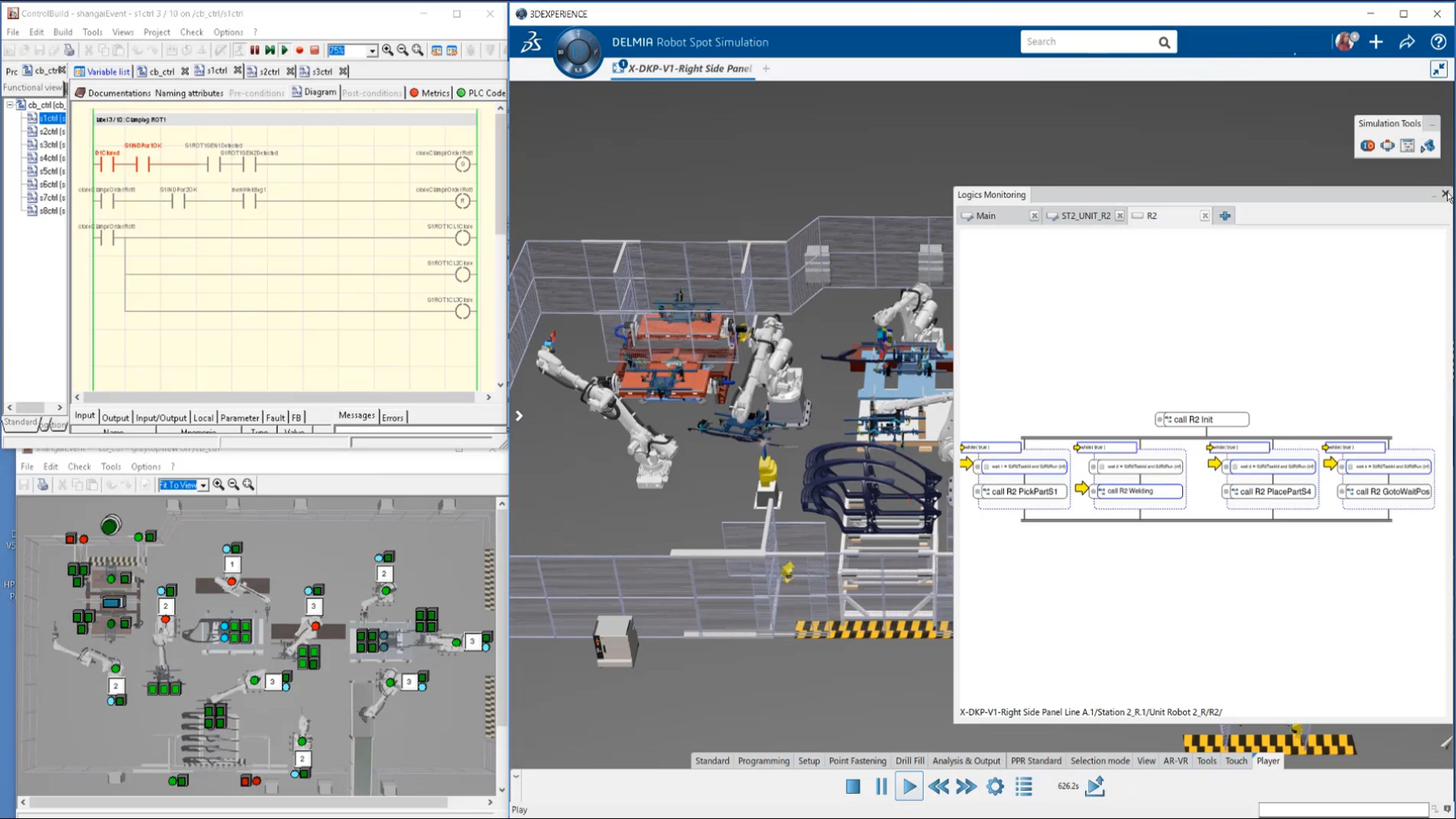
通过执行虚拟调试来完全模拟整个工作单元,包括 PLC 控制逻辑。
装配机器人
在 3D 虚拟工厂环境中对机器人装配系统进行编程、模拟和验证:
模拟和验证完整的机器人点焊以及钻孔和铆接系统,以消除代价高昂的碰撞并优化生产率。
提供精确的生产就绪型机器人程序,同时通过脱机机器人编程使机器人保持生产状态。
允许实现同步工程,以通过脱机机器人编程加快生产启动。
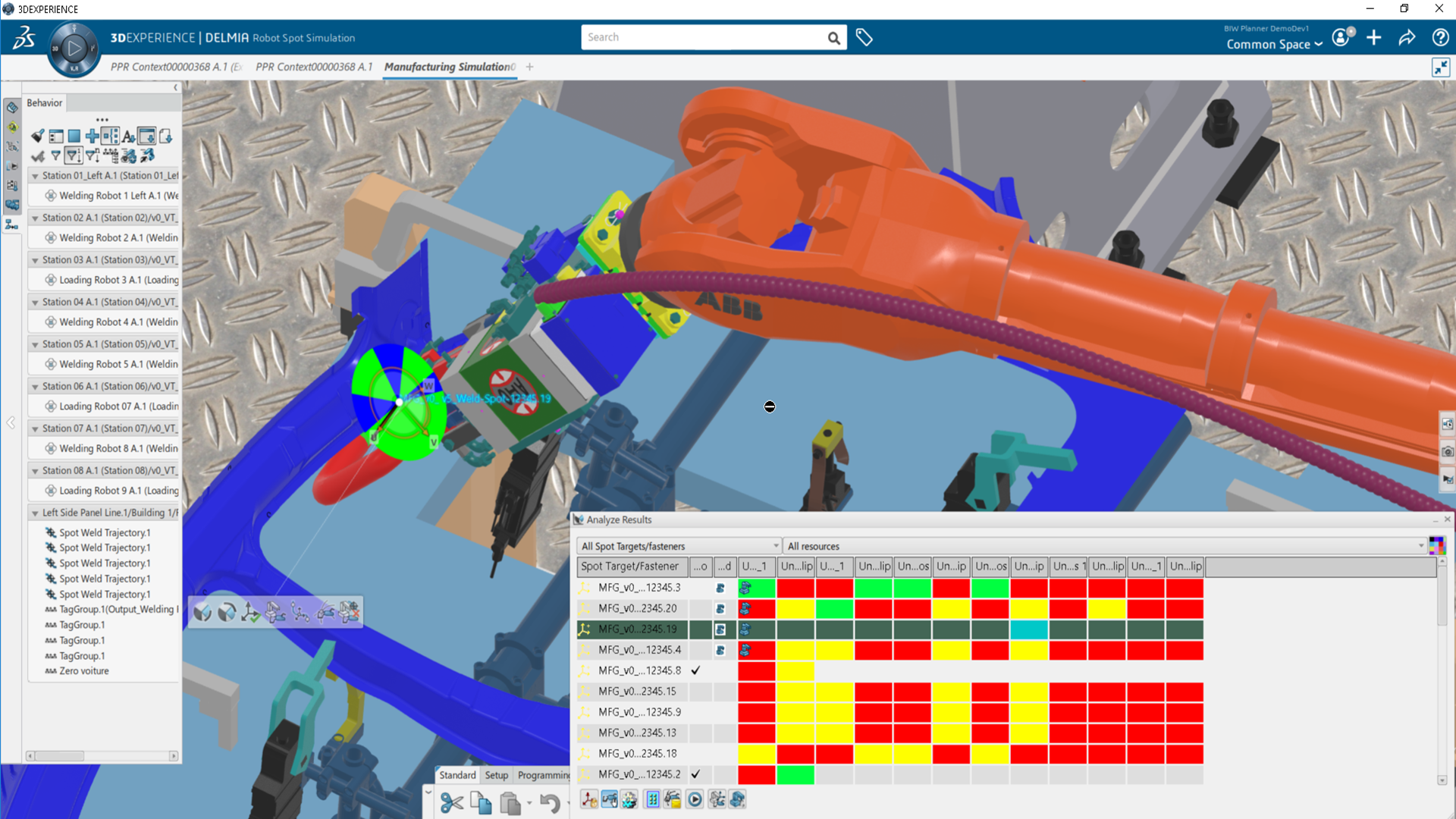
点焊机器人
在虚拟工厂中定义、验证白车身机器人系统并进行脱机编程:
使机器人保持生产状态,消除代价高昂的机器人和刀具碰撞,并加快生产启动。
模拟和验证完整的机器人点焊和物料搬运系统,以避免代价高昂的碰撞。
提供精确的生产就绪型机器人程序,同时通过脱机机器人编程使机器人保持生产状态。
允许实现同步工程,以通过脱机机器人编程加快生产启动。
通过执行虚拟调试来完全模拟整个工作单元,包括 PLC 控制逻辑。
焊接机器人
在虚拟工厂中定义、验证机器人焊接和密封剂沉积系统并进行脱机编程:
模拟和验证完整的焊接、密封剂沉积和搬运机器人系统,以消除代价高昂的碰撞并优化生产率。
提供精确的生产就绪型机器人程序,同时通过脱机机器人编程使机器人保持生产状态。
允许实现同步工程,以通过脱机机器人编程加快生产启动。
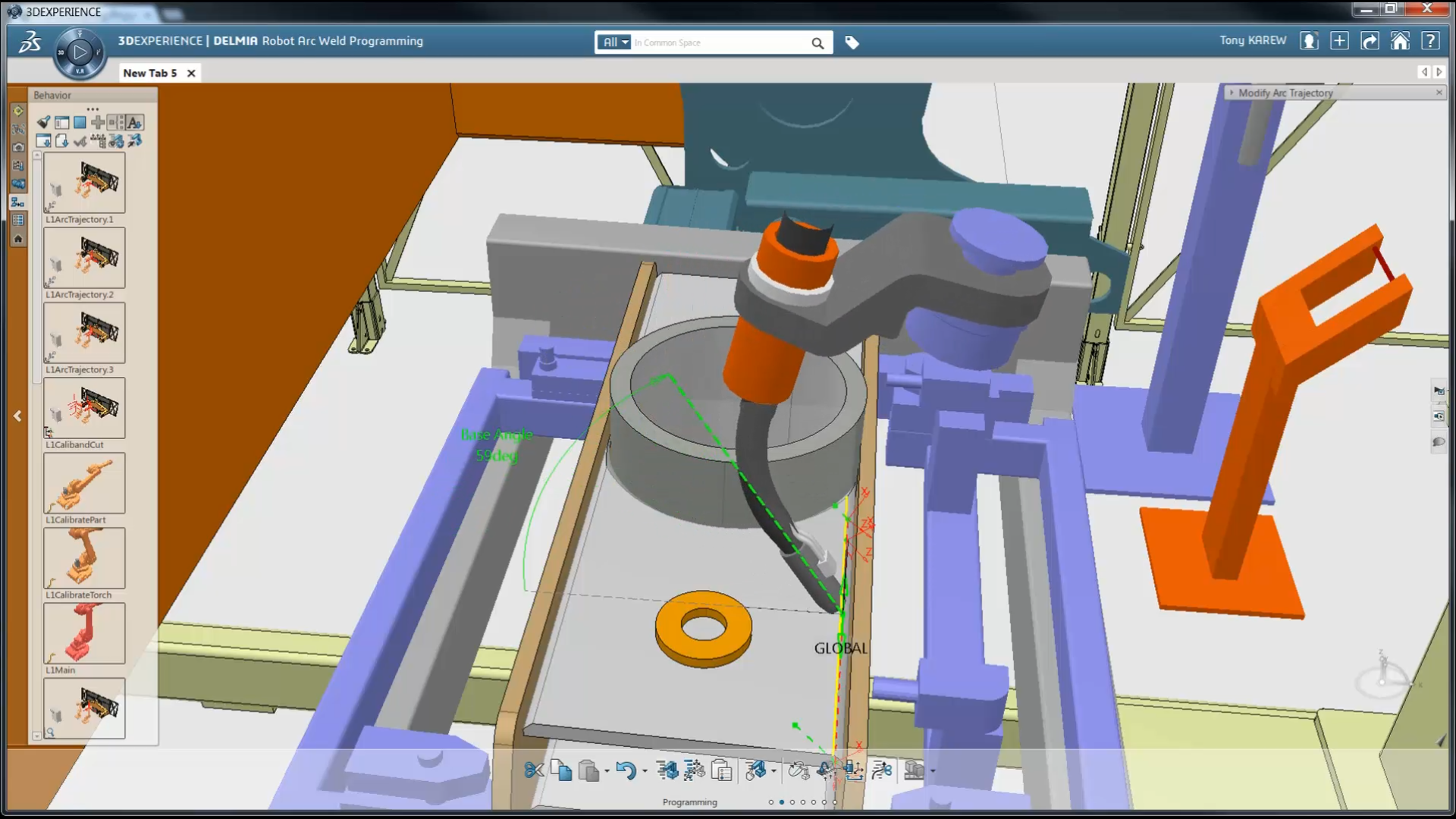
弧焊机器人
验证并优化机器人弧焊或密封剂沉积仿真和验证:
模拟和验证完整的机器人弧焊、粘合和密封剂沉积系统,以消除代价高昂的碰撞并优化生产率。
提供精确的生产就绪型机器人程序,同时通过脱机机器人编程使机器人保持生产状态。
通过执行虚拟调试来完全模拟整个工作单元,包括 PLC 控制逻辑。
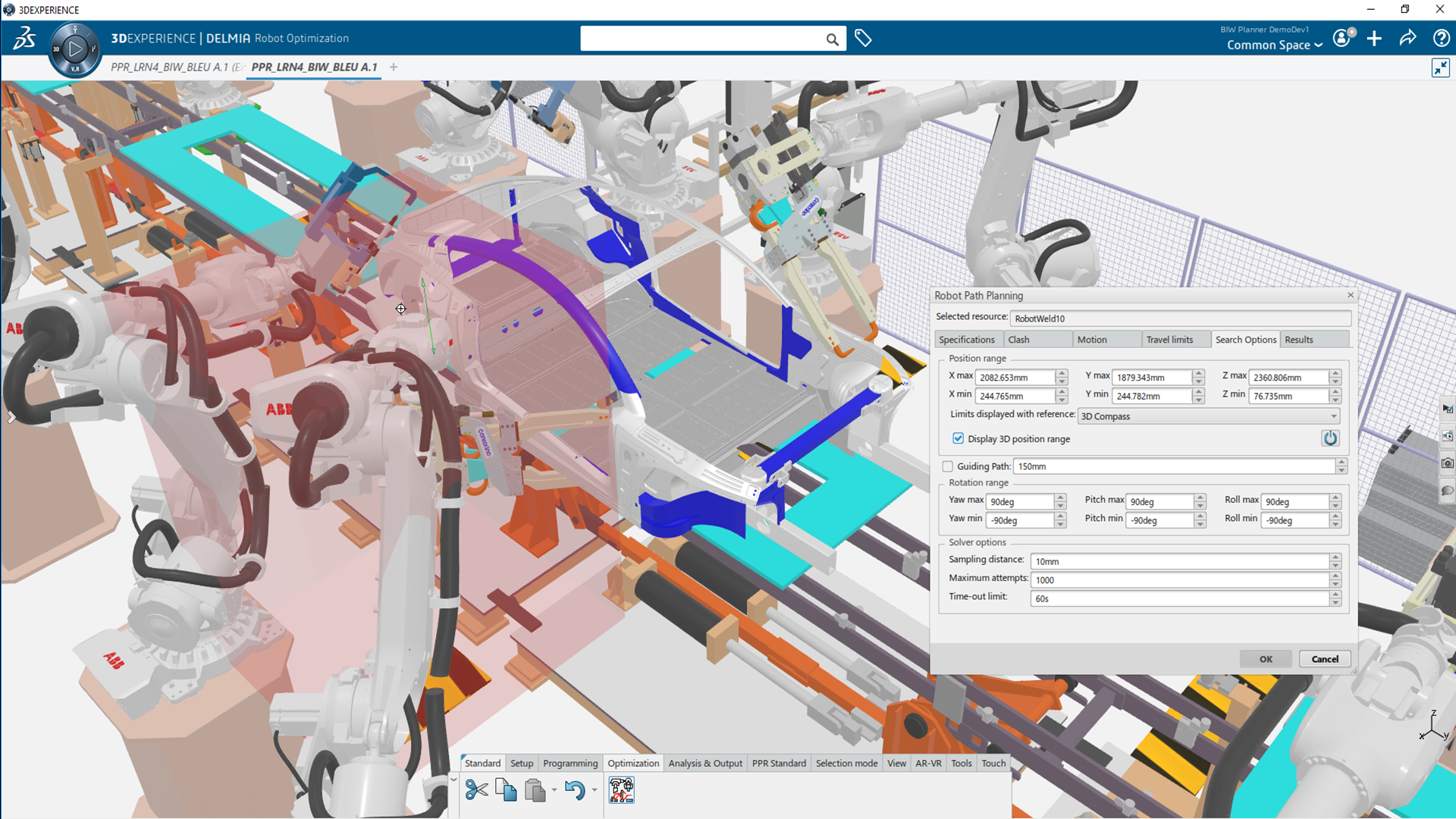
搬运机器人
在虚拟工厂中设计和验证机器人搬运系统,以使机器人保持生产状态:
消除代价高昂的机器人刀具碰撞,并加快生产启动 允许您设计机器人工作单元的刀具和设备。
验证完整的机器人搬运系统,以确保并加快生产 在购买昂贵的设备之前,通过设计和验证完整的机器人搬运系统来确保可行性。
模拟和优化机器人程序,以避免代价高昂的碰撞并最大限度地缩短循环时间。
在将新产品引入到生产系统之前,模拟以验证其搬运情况。
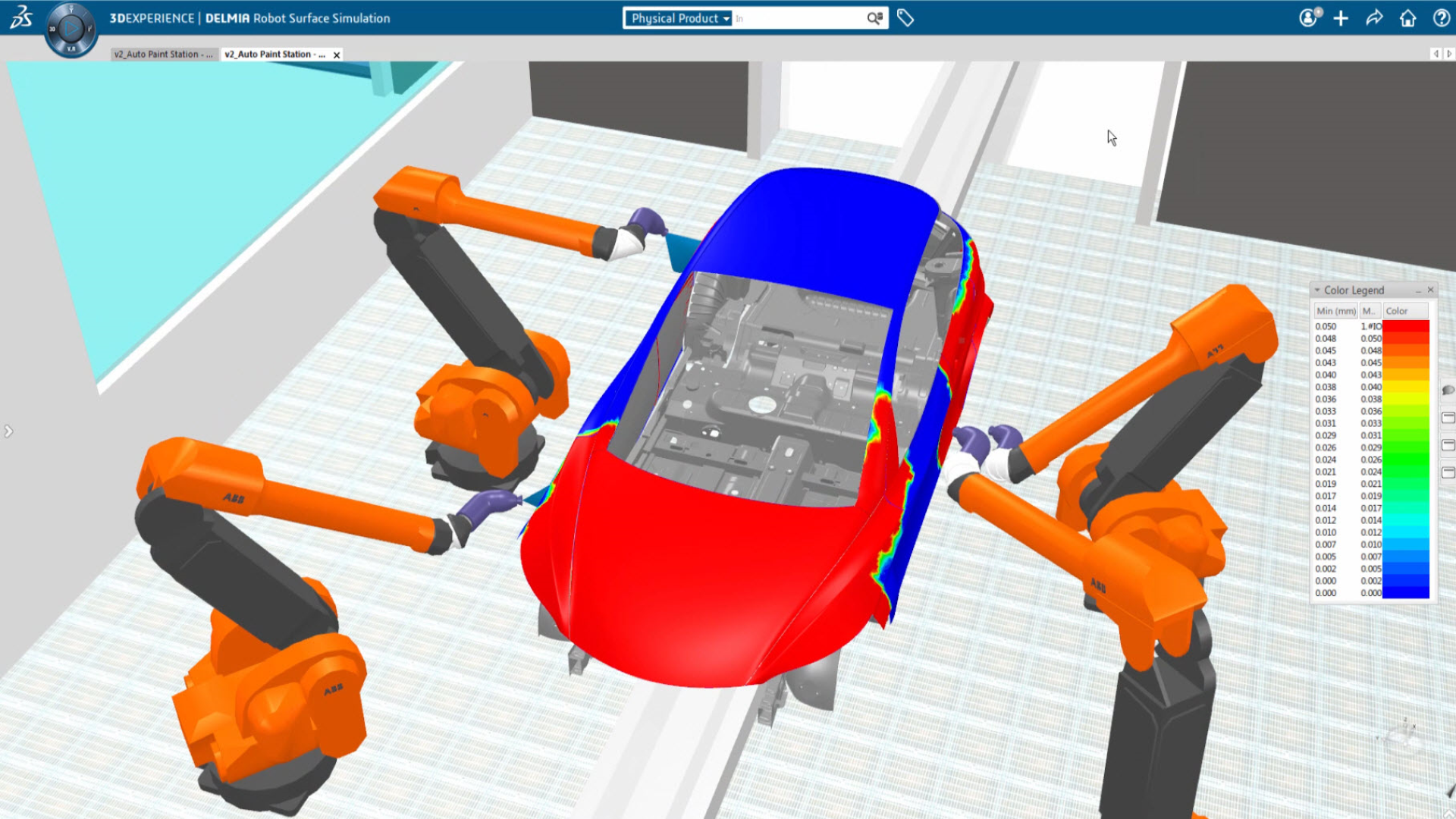
涂装机器人
在虚拟工厂中定义、验证机器人喷漆系统并进行脱机编程:
使机器人保持生产状态,提高喷漆流程的质量并加快生产启动。
模拟和验证完整的机器人喷漆或喷丸加工系统,以避免代价高昂的碰撞。
对机器人进行脱机编程,以延长真实机器人的生产时间并提高表面修整工艺质量。
允许实现同步工程,以便通过脱机机器人编程加快生产启动。
返回顶部