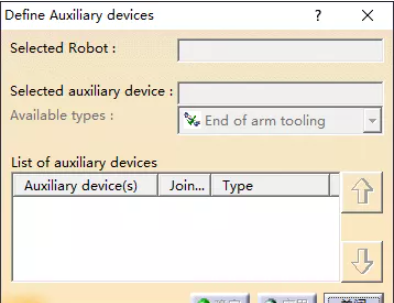
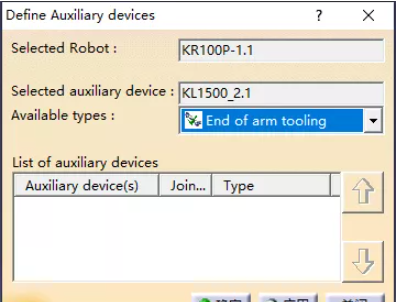
2.左侧浏览树中分别点选机器人KR100-P与机器人行走轴KL1500_2,Available types后点选“End of arm tooling”选项,即行走轴作为机器人的外部轴。
说明:Available types是选择机械装置的类型,可用类型如下:End of arm tooling:手臂工具末端类型,即作为机器人的外部轴;Rail/Track/Gantry:轨道或是龙门架;Workpiece Positioner:工件变位机;Conveyor:输送带。3.配置完成后点击应用按钮,此时在List of auxiliary devices下显示行走轴配置信息,可以看到行走轴已经被配置为机器人的第7个关节轴。