一般我们使用Delmia仿真时,Delmia自身资源库里面已有原厂设定好的机器人数模,假设我们使用到库没有机器人型号时,我们就要进行自行设定机器人IK。本期就分享一下机器人的IK如何设置。
一、操作环境调用及Frames of interest设定
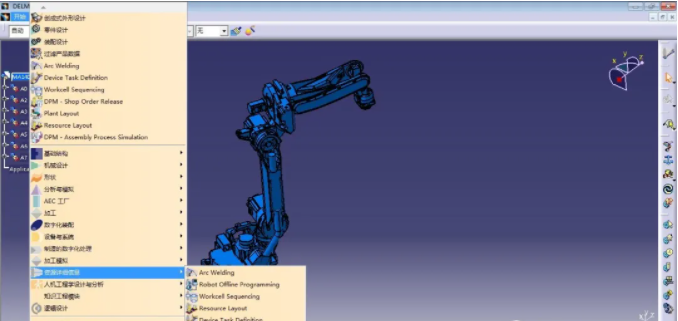
1.一般我们打开DELMIA时,都会进入一个默认的环境,这次机器人IK的建立需要进入到Device Building的环境,如下选取调用
2.将Frames of interest命令在状态栏中找出来或者鼠标右键状态栏即可显示出来,如下所示

3.进行Frames of interest命令的使用,①点击框架树命令;②点击要创建的零件即刻生成Frames of interest特征树(如下图);

其他关节零件也是逐一上述同样操作,即为如下图所示

注:此机器人数模为cgr格式的零件插入装配体组成的,用此格式可减少内存的占用及运行操作不卡顿
4.点击Frame Type命令,进行框架类型及坐标轴的设定。操作步骤:①点击Frame Type框架类型命令;②选择特征树要设置的状态;③进行第2步后会弹出两个对话框,然后选择“Design”设计坐标进行定义平面;④选取要定义的平面(及两关节零件间的零贴面去定义)

如何定义到平面?首先应在定义平面的对话框中选择移动原点上的第三个命令(在圆心定义原点)如图

然后在选取的平面上,选择平面的边缘任意选取三个点,即可定义到圆心上(如图所示)

点击确认,即可出现设置好的坐标(如下所示)

5.Design坐标图标显示设置。点击状态栏中的工具,选择选项,在出现的对话框中找到资源详细信息,进行设置修改大小及颜色。(此设置看个人习惯设置)如图

设置后如下图,坐标图标显示

6.继续进行Frame Type命令的操作,对机器人的其他旋转关节零件的设定。步骤:①将上一个坐标轴复制;②选择性粘贴在Frames of interest特征树上,断开链接。 如下图

这样第一个轴的设定就做好了,如图

以同样的操作进行下一个旋转关节零件的设定,即第二个轴的建立。(此时可返回到第4点的操作方法进行)如下图注释


最后,所有旋转关节零件(7轴)都设置好了,如下图所示







